 click
the imge for a quicktime of the head following a light source.
click
the imge for a quicktime of the head following a light source.

2DOF Bicore Head
click
the imge for a quicktime of the head following a light source.
here are close-ups of the mechanics:
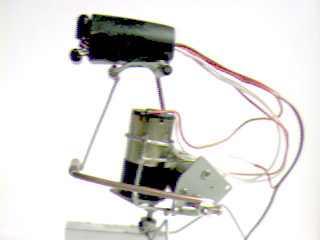

the back motor swings a long arm, which
pushes a connecting rod up and down to move the head up and down. Then
vertical motor pivots the entire mechanism from side to side. If the power
source is attached to the head, it can pivot a full 360 degrees.
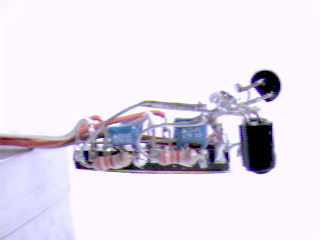
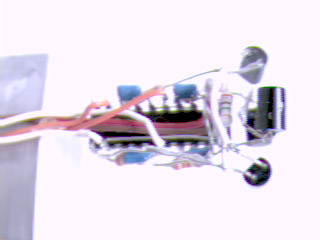
The circuit consists of two independent
bicores freeformed onto one 74HC240. The timing resistor of the bicores
is 2M with 3.3k resistors as buffers between the PDs and the bicores. This
prevents the bicores from locking up. Here are some details of the freeformed
circuit:
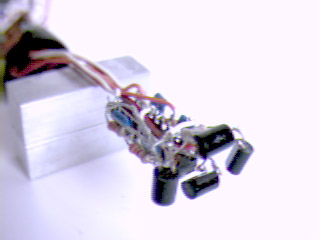
The photodiodes are angled out from each
other at about 90 degrees to allow for some overlap as well as giving some
peripheral vision.
A better alternative would be to use two
independent Power Smart Head circuits to control the mechanics. This way
the robot could be run for extended periods of time without worrying too
much about draining the batteries.