Initial wing design:

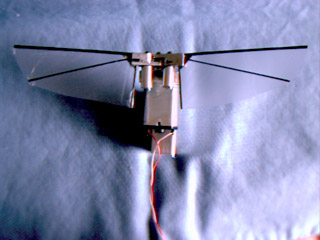
New wing design:
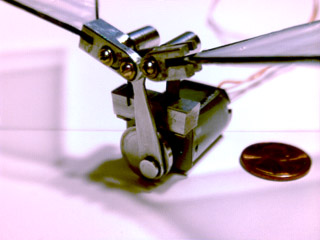
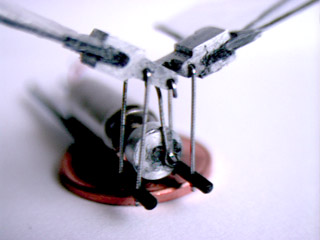
Close-up of flapping mechanism:
 |
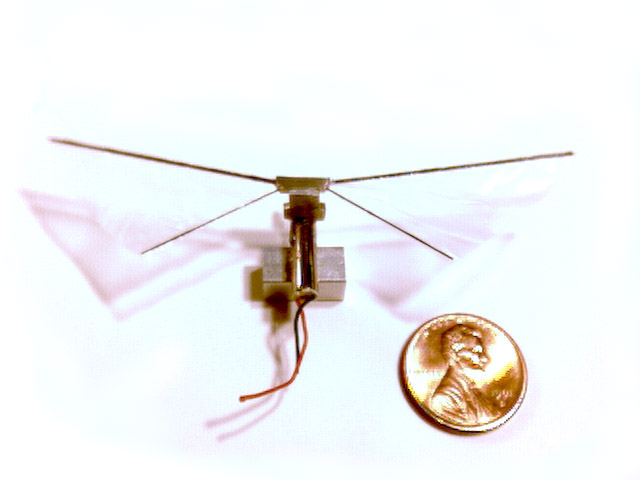
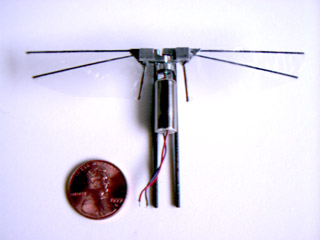
First generation micro air vehicle prototype
Dimensions:
| wingspan: |
15.2cm ( 6in. ) |
| weight of motor and mechanics: |
36g |
Observations:
The device is far too heavy for flight. It was built as a testbed for
various wing configurations, as well as to test if mechanics would work
as designed. My goal was to try and design a mechanism with the fewest
moving parts possible, while still using readily available supplies. An
electric motor was chosen for this reason. Motor technology is shrinking
to the point of being feasible for a micro air vehicle.
Wings:
The initial wing design had too much wing surface and prevented the
motor from reaching high speeds. A new wing design was built, having a
narrow tip and a wider base, this will hopefully allow a great enough surface
area for the device without over stressing the motor. The wings are built
from carbon fiber rods and plates for strength and light weight. The wing
membranes are made from thin plastic sheet, commonly used for trash bags.
I have developed a method of attaching the membranes to the wings using
CA adhesive that can withstand high frequency flapping without incurring
any damage.
Media:
mav.mov 645k quicktime video of the mechanics
in operation. This is the motor running at 1.5 volts at about 300 mA.
|
|
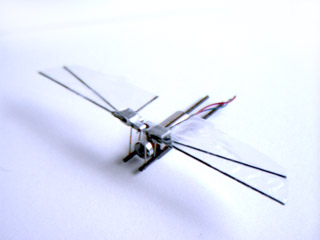
Second generation micro air vehicle prototype:
Completed: 11/28/01
Dimensions:
| wingspan: |
9cm (3.55in. ) |
| weight of motor, wings and mechanics: |
3.5g |
Observations:
This version needs to have the motor geared down. The current flapping
frequency is about 8 Hz or so at 1.5 volts. Once the motor is geared down
the motor will be closer to the top of its torque curve, which will allow
more power to be transmitted to the wings. Like the first generation, the
device has only one axis of wing movement, so hovering will not be possible.
However forward flight should be possible as demonstrated by Caltech/Aerovironment's
Microbat ornithopter.
Media:
2ndgen_mav_CG.mov 313k quicktime
video of the mechanics in operation. This is a computer generated animation
which was built as a prototype before the physical model was built.
|